نظام تكديس وترتيب العلب على المنصات في خط الإنتاج/ باليتايزر العلب Can Palletizer




باستخدام قابض روبوتي مغناطيسي متطور، يقوم النظام الروبوتي بتكديس العلب الفارغة أو غيرها من العبوات بدقة عالية وفق نمط الرصف المبرمج والمخصص لخط الإنتاج لديك، حيث تم تصميم هذا النظام خصيصاً ليلبي متطلبات خطوط تعبئة العلب عالية السرعة الخاصة بعلب المشروبات، وعلب الأغذية، والعلب الصناعية. كما يتميز الروبوت بإمكانية دمجه الكامل لعمليات تغذية المنصات تلقائياً، إخراج المنصات الممتلئة آلياً، ووضع الفواصل بين الطبقات بشكل أوتوماتيكي. ويمكن أيضاً ربطه بسلاسة مع ماكينات الربطوماكينات التغليف بالاسترتش لتشكيل وحدة تغليف نهائية متكاملة. ولذا، فإنه يسهم بشكل فعّال في تقليل الاعتماد على العمالة اليدوية، رفع دقة وانتظام الترصيص، وتعزيز كفاءة الإنتاج الإجمالية، مما يضمن أداءً تشغيلياً مستقراً وعائد أرباح أعلى.
| الابعاد | الأبعاد الكلية (الطول × العرض × الارتفاع): 14000 × 8000 × 3800 مم |
| نطاق الاستخدام | العلب المعدنية الفارغة وكافة العبوات المصنوعة من الصفيح المطلي بالقصدير |
| الطاقة الإنتاجية | 800 إلى 1500 علبة/ دقيقة |
| نطاق أحجام العلب | القطر: 50 إلى153 مم الارتفاع: 50–270 مم (قابل للتخصيص حسب متطلبات العميل) |
| أبعاد المنصة (الطول × العرض × الارتفاع) | 1200 × 1000 × 140 مم (قابل للتخصيص) |
| ارتفاع التكديس الأقصى | 2400 مم (قابل للتخصيص) |
| الهواء المضغوط | أقل من 0.5 ميجاباسكال |
| القدرة الكلية | 18 كيلو وات |
- نظام روبوتي لتكديس وترتيب العلب على المنصات في خط الإنتاج
- نظام روبوتي لتكديس وترتيب علب الدهانات والطلاء على المنصات في خط الإنتاج
- نظام روبوتي لتكديس وترتيب علب مسحوق الحليب على المنصات في خط الإنتاج
تم تصميم هذا النظام خصيصاً لمرحلة نهاية خط الإنتاج الخاصة بمناولة العلب الفارغة، حيث يعتمد على طاولة ترتيب العلب مع نظام التقاط مغناطيسي عالي الكفاءة لترصيص العلب على المنصات وفق نمط التكديس المطلوب. كما يتم تغذية المنصات الفارغة تلقائياً، بينما يقتصر دور المشغّل على وضع الفواصل بين الطبقات والإطارات العلوية فقط. وبعد اكتمال عملية الرصف، يتم تفريغ المنصات المكتملة آليًا دون أي تدخل يدوي إضافي.
وعند ربط النظام مع ماكينة الربط أو التحزيم وماكينة التغليف بالاسترتش، يتحول إلى خلية متكاملة بالكامل لنهاية خط الإنتاج، مما يسهم بشكل مباشر في تقليل المناولة اليدوية، خفض تكاليف العمالة، وتعزيز الكفاءة الإنتاجية الشاملة لخط العلب.
| العلب المناسبة | علب الصفيح المطلي بالقصدي وعلب الألومنيوم |
| قياس العلبة | القطر: 50 إلى 120 مم، الارتفاع: 50 إلى 200 مم (قابلة للتخصيص) |
| ارتفاع الرصف/ التكديس | الارتفاع المعياري/ أقل من أو يساوي 1.5 م (قابل للتخصيص) |
| سرعة التكديس/ الرصف | 2 إلى 3 طبقات/ دقيقة (يعتمد على قياس العلب وشكل وضع التكديس) |
| نظام التحكم | نظام التحكم PLC شاشة لمس، ويدعم التحكم عن بعد |
| المحرك (الدفع) | محرك سيرفو أو نظام هوائي |
| مصدر الطاقة | 380 فولت/ 50 هرتز (قابل للتخصيص) |
| أبعاد المنصة المناسبة | 1000 × 1200 × 120 مم (قابل للتخصيص) |
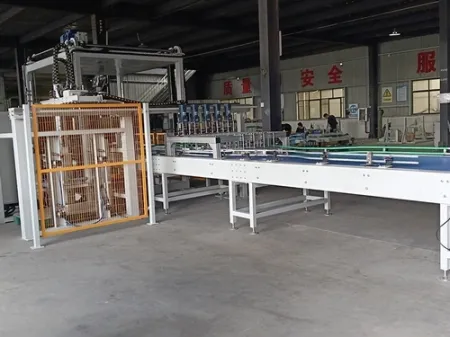
- نظام أوتوماتيكي منخفض المستوى لتكديس العلب - نسخة 1
- نظام أوتوماتيكي منخفض المستوى لتكديس العلب - نسخة 2
يدعم نظام تكديس العلب الفارغة عالي المستوى التكديس بارتفاعات كبيرة، حيث يصل الارتفاع النموذجي للمنصة إلى نحو 2.5 متر، مع إمكانية توفير ارتفاعات أعلى حسب الطلب لتلبية متطلبات التشغيل المختلفة.ويمكن تزويد النظام بوحدات اختيارية تقوم بتحميل الفواصل بين الطبقات تلقائياً بين كل طبقة وأخرى لتعزيز ثبات واستقرار التكديس، إضافة إلى وضع الإطارات العلوية آلياً، مما يسهم في تقليل العمل اليدوي، رفع مستوى السلامة التشغيلية، وتحسين كفاءة مرحلة نهاية خط الإنتاج بشكل ملحوظ.
ومن أجل تحقيق أتمتة متقدمة أكثر، يمكن تجهيز النظام بنظام تغذية وإخراج المنصات تلقائياً. فعندما تمتلئ المنصة (الباليت)، يتم نقلها تلقائياً إلى الخارج، ويتم إعداد المنصة الفارغة التالية للتحميل مباشرة.كما يمكن دمج نظام التكديس مع ماكينة الربط والتحزيم وماكينة التغليف بالاسترتش لتشكيل وحدة متكاملة لنهاية خط الإنتاج، مما يضمن معالجة العلب الفارغة بسرعة عالية، استقرارًا في التكديس، وتقليل الاعتماد على العمالة اليدوية بشكل كبير.
| ارتفاع التكديس | 2400 مم (قابل للتخصيص حسب مخطط الماكينة في خط الإنتاج) |
| قياس الباليت(المنصة) المناسب | 1100 × 1400 × 120 مم |
| الطاقة الإنتاجية | 3 طوابق بالدقيقة |
| قياس المنتج المناسب | القطر: 50 إلى 153 مم، الارتفاع: 50 إلى 270 مم |
| المنتجات المناسبة | علب معدنية، علب بلاستيكية، زجاجات (علب زجاج) |
| مصدر الطاقة | 3 × 380 V, 50 Hz, 7 kW |
| الهواء المضغوط | 0.6 ميجاباسكال، 0.1 لتر/ دقيقة |
| نظام التحكم | يعتمد النظام على نظام تحكم PLC متقدم للتحكم القابل للبرمجة، وأجهزة استشعار ضوئية دقيقة، ومفاتيح حد موثوقة، ومكونات هوائية عالية الجودة، جميعها من أبرز العلامات التجارية الألمانية واليابانية والتايوانية لضمان أداء مستقر وموثوقية تشغيلية قصوى |
يعتمد نظام تكديس هذه العلب الدلاء على نظام رؤية متقدم لتحديد مواقع علب وعبوات ودلاء الطلاء على الحزام الناقل، ثم يقوم بتكديسها عمودياً حتى الوصول إلى الارتفاع المطلوب. وبعد ذلك، يتم قبض العلبة المكدسة باستخدام قابض تثبيت خاص. كما يقوم الروبوت بعد دوران بزاوية 180 درجة بوضع كل كومة بدقة على المنصة، ثم يتم نقل المنصات (الباليتات) المحملة بواسطة الحزام الناقل إلى محطة التغليف بالاسترتش أو الربط والتحزيم لإكمال عملية التعبئة النهائية لنهاية خط الإنتاج.
| سعة التحميل القصوى | 20 إلى 60 كجم |
| نطاق التشغيل الأقصى للروبوت | 1500 إلى 2000 مم (تقريباً) |
| دقة تموضع عالية ومتكررة | ±0.05 إلى ±0.1 مم |
| طريقة القبض والتثبيت | التثبيت على جسم العلبة/ الدلو (قابل للتخصيص حسب الطلب) |
| عدد العلب لكل عملية التقاط | 16 عبوة/ دورة (قابل للتخصيص) |
| الميزات الرئيسية | قوابض التقاط وتثبيت ناعمة ومرنة بتصميم مضاد للخدوش |